-
RF603 — universal sensors with 2 to 1250 mm operating ranges.
RF603HS — high speed sensors;
RF609, RF609Rt, RF609-Wi-Fi — laser probes;
RF600 — large-base and long range sensors;
RF605 — compact sensors. Not recommended for ordering, as it will soon be discontinued;
RF602 — super compact sensors;
RF60i — specialized laser sensors for pavement profile and texture measurement.

RF603 Series – Multi-purpose Laser Sensors
- Available with Red or Blue laser diodes;
- Varied diode powers for indoor or outdoor applications;
- Binocular sensors for laser scanning.




RF602 Series – Super Compact Laser Sensors
- Unique combination of dimensions, performance and operating ranges
- Available with RED and BLUE laser diods

RF603HS Series – High Speed Triangulation Sensors
- Universal, high-speed laser sensor in compact case
- Available in Red and Blue diode wavelengths
- Ideal for capturing fast events and road profiling

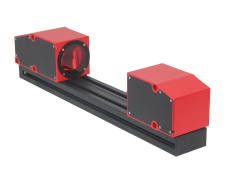
RF609 (RF609Rt) Series – Laser probes for holes inspection
- special sensors for holes geometry measurement

RF600 Series – Long-range/Large base Laser Sensors
- Up to 2.5 m measurement range
- Varied offset distances for custom applications
- Available in Blue diode wavelength for measuring hot objects

RF605 Series – Compact Laser Sensors
- sensors with excellent price/performance ratio

RF60i Series – Specialized Laser Sensors for Pavement Profile and Texture Measurement
- round laser spot of <1 mm diameter
- high resistance to solar radiation
- stable operation on wet surfaces
Laser Triangulation Sensors RF60х. Specification
| Parameter | Value | ||||||||||||||
|
Output Interface: |
|||||||||||||||
| digital |
RS232 (max. 460.8 kbit/s) or RS485 (max. 921.6 kbit/s) or RS232 and CAN V2.0B (max 1Mbit/s) or Ethernet and (RS32 or RS485) |
||||||||||||||
| analog | 4…20 mA (≤ 500 Ω load) or 0…10 V | ||||||||||||||
| Synchronization input | 2,4 – 5 V (CMOS, TTL) | ||||||||||||||
| Logic output | programmed functions, NPN: 100 mA max; 40 V max for output | ||||||||||||||
| Power supply, V | 9 …36 | ||||||||||||||
| Power consumption, W | 1,5..2 | ||||||||||||||
|
Environment resistance: |
|||||||||||||||
| Enclosure rating | IP67 ( for the sensors with cable connector only) | ||||||||||||||
| Vibration | 20g/10…1000Hz, 6 hours, for each of XYZ axes | ||||||||||||||
| Shock | 30 g / 6 ms | ||||||||||||||
| Operation temperature, °С |
-10…+60, (-30…+60 for the sensors with in-built heater), (-30…+120 for the sensors with in-built heater and air cooling housing) |
||||||||||||||
| Permissible ambient light, lx | >30000 | ||||||||||||||
| Relative humidity | 5-95% (no condensation) | ||||||||||||||
| Storage temperature, °С | -20…+70 | ||||||||||||||
| Housing material | aluminum | ||||||||||||||
Laser Triangulation Sensors RF603. Specification
(universal sensors with 2 to 1250 mm operating ranges)| RF603- | R-X/4 | X/2 | X/5 | X/10 | X/15 | X/25 | X/30 | X/50 | X/100 | X/250 | X/500 | X/750 | X/1000 | X/1250 | |
| Base distance X, mm | 39 | 15 | 15 | 15, 25, 60 | 15, 30, 65 | 25, 45, 80 | 35, 55, 95 | 45, 65, 105 | 60, 90, 140 | 80 | 125 | 145 | 245 | 260 | |
| Measurement range, mm | 4 | 2 | 5 | 10 | 15 | 25 | 30 | 50 | 100 | 250 | 500 | 750 | 1000 | 1250 | |
| Linearity, % | ±0.05 of the range | ±0.1 | |||||||||||||
| Resolution, % | 0.01 of the range (for the digital output only) | 0.02 | |||||||||||||
| Temperature drift | 0,02% of the range/°С | ||||||||||||||
| Max. measurement frequency, Hz | 9400 | ||||||||||||||
| Light source: |
red semiconductor laser, 660 nm wavelength or UV semiconductor laser 405/450 nm wavelength (BLUE version) |
||||||||||||||
| model | RF603 | ||||||||||||||
| output power | ≤0,2 | ≤5 mW | |||||||||||||
| laser safety Class | 1 | 3R (IEC60825-1) | |||||||||||||
| model | RF603L |
|
|||||||||||||
| output power | ≤0,95 mW |
|
|||||||||||||
| laser safety Class | 2 (IEC60825-1) |
|
|||||||||||||
| model | RF603Р | ||||||||||||||
| output power | ≤20 mW | ||||||||||||||
| laser safety Class | 3В (IEC60825-1) | ||||||||||||||
| Weight (without cable), gram | 100 | ||||||||||||||
Laser Triangulation Sensors RF603HS. Specification
(high speed sensors)| RF603HS- | X/2 | X/5 | X/10 | X/15 | X/25 | X/30 | X/50 | X/100 | X/250 | X/500 | X/750 | |||
| Base distance X, mm | 15 | 15 | 15, 25, 60 | 15, 30, 65 | 25, 45, 80 | 35, 55, 95 | 45, 65, 105 | 60, 90, 140 | 80 | 125 | 145 | |||
| Measurement range, mm | 2 | 5 | 10 | 15 | 25 | 30 | 50 | 100 | 250 | 500 | 750 | |||
| Max. measurement frequency, kHz | 70 | |||||||||||||
| Linearity, % | ±0.1 (70 kHz), of the range | |||||||||||||
| Resolution, % | 0.01 (70 kHz), of the range | |||||||||||||
| Temperature drift | 0,02% of the range/°С | |||||||||||||
| Light source |
red semiconductor laser, 660 nm wavelength or UV semiconductor laser 405/450 nm wavelength (BLUE version) |
|||||||||||||
| Output power | ≤4.8 mW | ≤20 mW | ≤80 mW | |||||||||||
| Laser safety Class | 3R (IEC/EN 60825-1:2014) | 3В (IEC/EN 60825-1:2014) | ||||||||||||
| Weight (without cable), gram | 110 | |||||||||||||
Laser Triangulation Sensors RF609 (RF609Rt). Specification
(special sensors for holes geometry measurement)| RF609 (RF609Rt)- | 9/19 | 16/48 | |||||
| Diameter of the laser sensor body, mm | 9 | 15 | |||||
| Range of controlled diameters, mm | 9.2...19 | 16...48 | |||||
| Depth of controlled holes, mm | on request | ||||||
| Base distance of the laser sensor, mm | 0.1 | 0.5 | |||||
| Working range of the laser sensor, mm | 5 | 16 | |||||
| Laser sensor linearity, % | ±0.05 of the range | ||||||
| Max. measurement frequency, Hz | 9400 | ||||||
| Light source | red semiconductor laser, 660 nm wavelength for both models; blue or UV semiconductor laser, 450 or 405 nm wavelength (BLUE version) only for 16/48 model | ||||||
| Output power, mW | ≤1 | ||||||
| Laser safety class | 2 (IEC60825-1) | ||||||
| Housing material | aluminum | ||||||
| Sync inputs (RF609), V | 2.4 – 24, trigger (IN input) | ||||||
| Sync inputs (RF609Rt), V | trigger (IN input), A-B encoder (IN and AL inputs) | ||||||
| Power supply, V | 9…36 | ||||||
| Power consumption, W | 1...1.5 | ||||||
| Weight (without cable), RF609, gram | 40 | 85 | |||||
| Weight (without cable), RF609Rt, gram | from 900 | ||||||
Laser Triangulation Sensors RF600. Specification
(large-base and long range sensors)| RF600- | X/10 | X/30 | X/40 | X/100 | X/250 | X/500 | X/600 | X/1000 | X/1000 | X/1500 | X/2000 | X/2500 | |
| Base distance X, mm | 230 | 300 | 330 | 500 | 230 | 300, 1000 | 230 | 380 | 1300 | 390 | 410 | 420 | |
| Measurement range, mm | 10 | 30 | 40 | 100 | 250 | 500 | 600 | 1000 | 1000 | 1500 | 2000 | 2500 | |
| Linearity, % | ±0.1 of the range | ||||||||||||
| Resolution, % | 0.01 of the range (for the digital output only) | 0.02 | |||||||||||
| Temperature drift | 0,02% of the range/°С | ||||||||||||
| Max. measurement frequency, Hz | 9400 or 70000 | ||||||||||||
| Light source |
red semiconductor laser, 660 nm wavelength or UV semiconductor laser 405/450 nm wavelength (BLUE version) |
||||||||||||
| output power | ≤4,8 mW | ≤20 mW | |||||||||||
| laser safety Class | 3R (IEC60825-1) | 3В (IEC60825-1) | |||||||||||
| Weight (without cable), gram | 500 | ||||||||||||
Laser Triangulation Sensors RF605. Specification
(inexpensive compact sensors)| RF605- | 25/50 | 45/100 | 65/250 | 105/500 | |
| Base distance X, mm | 25 | 45 | 65 | 105 | |
| Measurement range, mm | 50 | 100 | 250 | 500 | |
| Linearity, % | ±0.1 of the range | ||||
| Resolution, % | 0.02 of the range | ||||
| Temperature drift | 0,02% of the range/°С | ||||
| Max. sampling frequency, Hz | 2000 | ||||
| Light source | red semiconductor laser, 660 nm wavelength | ||||
| Output power, mW | ≤0,95 mW | ||||
| Laser safety Class | 2 (IEC60825-1) | ||||
| Weight (without cable), gram | 60 | ||||
Laser Triangulation Sensors RF602. Specification
(super compact sensors)| RF602- | 20/10 | 20/25 | 30/50 | 55/100 | 65/250 | 105/500 | |
| Base distance X, mm | 20 | 20 | 30 | 55 | 65 | 105 | |
| Measurement range, mm | 10 | 25 | 50 | 100 | 250 | 500 | |
| Linearity, % | ±0,05 of the range | ±0,1 | |||||
| Resolution, % | 0,01 of the range | 0,02 | |||||
| Temperature drift | 0,02% of the range/°С | ||||||
| Max. sampling frequency, Hz | 9400 | ||||||
| Light source |
red semiconductor laser, 660 nm wavelength or UV semiconductor laser 405 nm wavelength (BLUE version) |
||||||
| Output power, mW | ≤1 | ||||||
| Laser safety Class | 2 (IEC60825-1) | ||||||
| Weight (without cable), gram | 40 | ||||||
Laser Triangulation Sensors RF60i. Specification
(pavement measurement)| Model | RF603Р | RF603Р | RF607 | RF607 | RF607 | RF603Txt | |
| Base distance X, mm | 125 | 245 | 190 | 210 | 230 | 30 | |
| Measurement range, mm | 500 | 1000 | 500 | 200 | 250 | 30 | |
| Linearity, % of the range | ±0.05 | ±0.03 | ±0.05 | ||||
| Resolution, % of the range | 0,01 (for the digital output only) | ||||||
| Temperature drift | 0,02% of the range / °С | ||||||
| Max. measurement frequency, Hz | 9400 | 70000 | 9400 | ||||
| Light source | red semiconductor laser, 660 nm wavelength | ||||||
| Output power, mW | <20 | <80 | <1 | ||||
| Laser safety class (IEC/EN 60825-1:2014) | 3В | 2 | |||||
| Laser spot shape | elliptic | round | |||||
| Laser spot size "beginning-middle-end of the range", mm | 1,7х3- 0,16х0,2- 3х5 | 1,6х2,5- 0,5х0,8- 1,6х3,5 | 0,9-1-0,9 | 0,8-0,7-0,6 | 0,8-0,7-0,5 | 0,06-0,025-0,06 | |

- Thickness

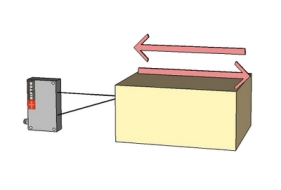
- Object Dimensions

- Objects Sorting
- Runout

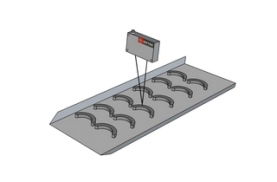
- Profiling

- Object/Target Displacements
Laser scanning of the inner surface of the tubes using RF609-9/19 triangulation sensor
Order information for Laser Triangulation Sensor RF603
RF603(BLUE)(L/Р).F-X/D(R)-SERIAL-ANALOG-IN-AL-СС(90X)(R)-M-H-P-B
| Symbol | Description |
| (BLUE) | Blue (405/450 nm) laser option |
| L/P | Laser safety class: L - Class 2, P - Class 3B |
| F | Max. measurement frequency, kHz (2 or 10) |
| X | Base distance (beginning of the range), mm |
| D | Measurement range, mm |
| (R) | Round shape laser spot (see p. 18.3) |
| SERIAL | The type of serial interface: 232 (RS232) or 485 (RS485); CAN or ET (Ethernet) |
| ANALOG | Attribute showing the presence of 4…20 mA ( I ) or 0…10 V ( U ) |
| IN | Trigger input (input of synchronization) presence |
| AL | User programmed input/output signal |
| CC(90X)(R) |
Cable gland - CG, or cable connector - CC (Binder 712, IP67) Note 1: sensors with CAN or Ethernet interfaces have 2 connectors or two cable glands. Note 2: 90(X) option – angle cable connector (see. p. 18.4.) Note 3: R option – robot cable |
| M | Cable length, m |
| H | Sensor with in-built heater |
| P | Sensor with protective air cooling housing (see p. 18.1.) |
| B | Sensor with spray guard (see p. 18.2) |
Example: RF603L.140/100R-232-I-IN-AL-24-СCR90A-3 – Class 2 laser, base distance – 140 mm, range – 100mm, round shape laser spot, RS232 serial port, 4…20 mA analog output, trigger input and AL input are available, cable connector, angle type, position "A", robot cable, 3 m cable length.
Order information for Laser Triangulation Sensor RF603HS
RF603HS(BLUE).F-X/D(R)-SERIAL-ANALOG-IN-AL-СС(R)(90)-M-H-P-B
| Symbol | Description |
| (BLUE) | Blue (405 nm) laser option |
| F | Maximal sampling frequency, 60 or 120 or 160 kHz. |
| X | Base distance (beginning of the range), mm |
| D | Measurement range, mm |
| (R) | Round shape laser spot (see p.18.3.) |
| SERIAL | The type of serial interface: (RS232 and Ethernet) – 232-ET or (RS485 and Ethernet) – 485- ET. |
| ANALOG | Attribute showing an analog output presence 0…10 V (U). |
| IN |
User programmed signal, which has several purposes:
1) Trigger input (input of synchronization). |
| AL |
User programmed signal, which has several purposes. It can be used as: 1) Logical output (indication of run-out beyond the range). 2) Line of mutual synchronization of two and more sensors. 3) Line of hardware zero setting. 4) Hardware laser switch ON/OFF. 5) Encoder_B input. 6) Status line input. 7) Input for Ethernet restart. |
| CC(90X)(R) |
Cable gland - CG, or cable connector - CC (Binder 712, IP67). Note 1: 90(X) option – angle cable connector (see. p. 18.4.). Note 2: R option – robot cable. |
| M | Cable length, m |
| H | Sensor with in-built heater |
| P | Sensor with protect air cooling housing (see p.18.1) |
| B | Sensor with spray guard (see p.18.2.) |
Example: RF603HS.60-140/100R-232-ET-U-IN-AL-24-СCR90A-3 – 60 kHz sampling frequency, base distance – 140 mm, range – 100 mm, round shape laser spot, RS232 and Ethernet serial port, 0…10 V analog output, trigger input and AL input are available, cable connector, angle type, position "A", robot cable, 3 m cable length.
Order information for Laser Triangulation Sensor RF609 and RF609Rt
RF609(Rt)(BLUE)-X/D-L-SERIAL-ANALOG--M
| Symbol | Description |
| Rt | Probe with a built-in slip ring. |
| (BLUE) | Blue laser option (405 nm or 450 nm). Only for 16/48 probes. |
| X | Minimum controlled diameter, mm. |
| D | Maximum controlled diameter (when the probe is located along the hole axis), mm. |
| L | Probe length (prior consultation with the manufacturer is required). |
| SERIAL | Type of serial interface for RF609Rt: 232 (RS232) or 485 (RS485) |
| ANALOG | Attribute showing the presence of analog output for RF609Rt: 4…20 mA (I) or 0…10 V (U). |
| M | Cable length, m. |
Example: RF609Rt-9/19-100-232-I-3 – Probe with a built-in slip ring, red semiconductor laser, range of controlled diameters - 9...19 mm, probe length - 100 mm, RS232 serial port, analog output 4…20 mA, cable length - 3 m.
Order information for Laser Triangulation Sensor RF600
RF600(BLUE).F-X/D(R)-SERIAL-ANALOG-IN-AL-СС(90X)(R)-M-H
| Symbol | Description |
| (BLUE) | Blue (405/450 nm) laser option |
| F | Max. measurement frequency, kHz (10 or 70) |
| X | Base distance (beginning of the range), mm |
| D | Measurement range, mm |
| (R) | Round shape laser spot |
| SERIAL | The type of serial interface: 232 (RS232) or 485 (RS485); CAN or ET (Ethernet) |
| ANALOG | Attribute showing the presence of 4…20 mA ( I ) or 0…10 V ( U ) |
| IN | Trigger input (input of synchronization) presence |
| AL | User programmed input/output signal |
| CC(90X)(R) |
Cable gland - CG, or cable connector - CC (Binder 712, IP67) Note 1: sensors with CAN or Ethernet interfaces have 2 connectors or two cable glands. Note 2: 90(X) option – angle cable connector Note 3: R option – robot cable |
| M | Cable length, m |
| H | Sensor with in-built heater |
Example: RF600.10-380/1000-232-I-IN-AL-ССR90А-3 – Sensor RF600, max. measurement frequency – 9.4 kHz, base distance – 380 mm, range – 1000 mm, RS232 serial port, 4…20 mA analog output, trigger input and AL input are available, cable connector, angle type, position "A", robot cable, 3 m cable length.
Order information for Laser Triangulation Sensor RF605
RF605-X/D-SERIAL-ANALOG-IN-AL- СС(R)-M
| Symbol | Description |
| X | Base distance (beginning of the range), mm |
| D | Measurement range, mm |
| SERIAL | Type of serial interface: RS232 - 232, or RS485 - 485 |
| ANALOG | Attribute showing the presence of 4…20 mA ( I ) or 0…10V ( U ) |
| IN | Trigger input (input of synchronization) presence |
| AL |
Programmed signal, which has triple purpose. It can be used as 1) logical output; 2) line of mutual synchronization of two and more sensors 3) line of hardware zero setting |
| CC(R) |
Cable gland - CG, or cable connector - CC (Binder 702, IP67) Note 1: R option – robot cable |
| M | Cable length, m |
Example: RF605-105/500-232-I-IN-СG-3 –base distance – 105 mm, range – 500 mm, RS232 serial port, 4…20mA analog output, trigger input is available, cable gland, 3 m cable length.
Order information for Laser Triangulation Sensor RF602
RF602(BLUE)-X/D-SERIAL-ANALOG-IN-AL--M
| Symbol | Description |
| X | Base distance (beginning of the range), mm |
| D | Measurement range, mm |
| SERIAL | The type of serial interface: 232 (RS232) or 485 (RS485) |
| ANALOG | Attribute showing the presence of analog output: 4…20 mA (I) or 0…10 V (U) |
| IN | Synchronization input |
| AL | User programmable input/output signal |
| (BLUE) | Blue laser option (405 nm or 450 nm) |
| M | Cable length, m |
Example: RF602-65/250-232-I-IN-AL-3 – red laser, base distance - 65 mm, measurement range - 250 mm, RS232 serial port, 4…20 mA analog output, synchronization input and AL output are available, cable length - 3 m.
Order information for Laser Triangulation Sensor RF60i
RF60i-X/D-SERIAL-ANALOG-IN-AL-СС(90X)(R)-M-H-P-B
| Symbol | Description |
| i | Index: 3Р or 7 or 3Txt |
| X | Base distance (beginning of the range), mm |
| D | Measurement range, mm |
| SERIAL |
The type of serial interface: (232 (RS232) or 485 (RS485)) and (ET (Ethernet)) |
| ANALOG | Attribute showing the presence of 4…20 mA ( I ) or 0…10 V ( U ) |
| IN | Sensor with trigger input (input of synchronization) |
| AL | User programmed input/output signal |
| CC(90X)(R) |
Cable gland - CG, or cable connector - CC (Binder 712, IP67) Note 1: sensors with the Ethernet interface have 2 connectors or two cable glands. Note 2: 90X option – angle cable connector (see. p. 18.3). Note 3: R option – robot cable |
| M | Cable length, m |
| H | Sensor with in-built heater |
| P | Sensor in protective housing with air cooling system (see p. 18.1.) |
| B | Sensor with spray guard (see p. 18.2) |
Example: RF603P-125/500-232-I-IN-AL-ССR90А-3 – Laser sensor for pavement profile and texture measurement RF603P, base distance - 125 mm, measurement range - 500 mm, RS232 serial port, 4…20 mA analog output, trigger input and AL input are available, cable connector, angle type, position "A", robot cable, 3 m cable length.