

Измерительная машина предназначена для бесконтактного измерения геометрических параметров изделий, в частности рычагов подвески автомобилей.
Область применения машины — крупносерийное производство. Место установки — конвейерная линия.
Технические характеристики машины могут быть изменены под конкретную задачу.

3D лазерная измерительная машина РФ1010SL

3D лазерная измерительная машина RF1010SL
| Параметр | Значение | |
| Диапазон сканирования Y, мм | 370 | |
| Диапазон сканирования, Z, мм | 135 | |
| Диапазон сканирования Х (начало диапазона Z), мм | 45 | |
| Диапазон сканирования Х (конец диапазона Z), мм | 70 | |
| Погрешность измерения, оси X, Z, мкм | ±50 | |
| Погрешность измерения, ось Y, мкм | ±20 | |
| Максимальная скорость измерений, профилей/с | 250 | |
| Быстродействие, мм/с | до 80 | |
| Измеряемые параметры рычага | см. п. 13.1.2 тех. руководства | |
| Размер, мм | 730х415х180 | |
| Вес, кг | 40 | |
| Напряжение питания |
трехфазная сеть переменного тока с частотой (50 ± 1) Гц, |
|
| Потребляемая мощность, Вт | 300 | |
| Условия эксплуатации | Температура окр. воздуха: +1..+350 С Отн. влажность воздуха при 250 С 65 | |
В основу работы машины положен принцип 3D лазерного сканирования объекта с последующим получением его 3D компьютерной модели и определения из полученной модели геометрических параметров.
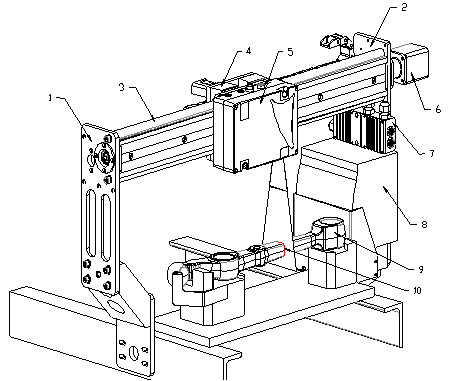
Устройство машины поясняется рисунком 1 (машина со снятой крышкой).
Машина содержит две стойки 1, 2, замкнутые направляющей 3. На направляющей 3 установлена каретка 4, несущая лазерный сканер 5. На стойке 1 установлен шаговый двигатель 6, соединенный с шарико-винтовой парой (не показа-на), приводящий в движение каретку 4. В крайних положениях каретки 4 установлены концевые выключатели (не показаны). На стойке 2 установлен сигнальный блок 7 и источник питания 8.
Лазерное излучение сканера 5 формируется в виде линии и проецируется на контролируемый объект 9. Полученное изображение контура (профиля сечения) 10 объекта анализируется сигнальным процессором сканера, который рассчитывает расстояние до объекта (координата Z точек) для каждой из множества точек вдоль лазерной линии на объекте (координата Х точек).
Машина работает следующим образом. Установленный на каретке лазерный сканер перемещается вдоль объекта, направление перемещения формирует координату Y. Через определенные фиксированные линейные интервалы вдоль координаты Y, задаваемые шаговым приводом, лазерный сканер определяет координаты точек профиля объекта (X,Z), рис. 2.
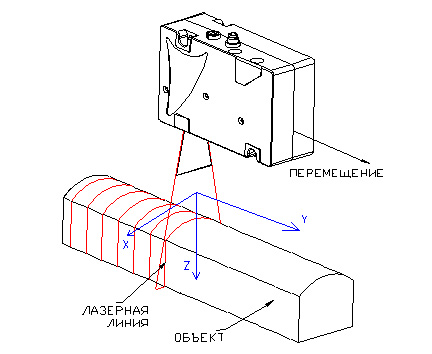
В результате получают 3D компьютерную модель объекта в виде облака точек с известными координатами профиля (X,Y,Z). Требуемые геометрические параметры объекта рассчитываются из полученной модели.
3D лазерная измерительная машина 1010SL
https://cloud.riftek.com/s/sP9b9tMnreSfiR7